2019年版Overleaf v2 日本語Tex環境テンプレ
環境概要
以前OverleafとSharelatexの紹介などをしたが,いつの間にか統合されてOverleaf v2になっているようだ。 オンライン環境がある場合余分にソフトを起動しなくて済むため比較的使用感は良かった(TexLive2017あたりが入っている?)。
- 日本語環境構築
- Github連携
日本語環境の構築
最初にやることは, - Menuを開いてデフォルトのTexコンパイラを”Latex”へと変更
具体的な画面の状況や操作などはここの記事にある。
ファイル構造
文章は最初から作成してあるmain.texを編集していく。
最低限のものを詰め込むと以下のようなファイル構成になると思う。
. ├ fig/ (図とか) ├ latexmk(コンパイル設定) ├ main.tex (本文) ├ preamble.tex (プリアンブル)
latexmkの作成
latemxmkでコンパイルの方法を設定する。
$latex = 'platex'; $bibtex = 'pbibtex'; $dvipdf = 'dvipdfmx %O -o %D %S'; $makeindex = 'mendex %O -o %D %S'; $pdf_mode = 3;
preamble.texの作成
これはお好みで良い。自分用のものを以下に記す。
\usepackage[dvipdfmx]{color,graphicx}
\usepackage{ascmac}
\usepackage{amsmath,amssymb}
\usepackage{epsf}
\usepackage{float}
\newcommand{\bm}[1]{\mbox{\boldmath $#1$}}
\newcommand{\eq}[1]{Eq.(\ref{eq:#1})}
\newcommand{\zu}[1]{図\ref{fig:#1}}
\newcommand{\shiki}[1]{(\ref{eq:#1})}
\newcommand{\fig}[1]{Fig.\ \ref{fig:#1}}
\newcommand{\grp}[1]{Fig.\ \ref{grp:#1}}
\newcommand{\tab}[1]{Table\ \ref{tab:#1}}
\newcommand{\defeq}{:=}
\newcommand{\mr}[1]{\mathrm{#1}}%rm体
\newcommand{\ml}[1]{\mathcal{#1}}%frac体
\newcommand{\bmat}[1]{\begin{bmatrix} #1 \end{bmatrix}}%行列簡略化
\newcommand{\pmat}[1]{\begin{pmatrix} #1 \end{pmatrix}}%行列簡略化
\newcommand{\mat}[1]{\left( \begin{matrix} #1 \end{matrix} \right)}%行列簡略化
\newcommand{\expo}[1]{ \mathrm{e}^{#1} }
本文の設定
使う論文のテンプレ次第でいかようにもなるが,先程のpreambleをinputで読み込ませるとスマートな見た目になる。 余白の調整はgeometryパッケージを使うと良い。
\documentclass[10pt,a4paper,oneside,twocolumn,fleqn,dvipdfmx]{jsarticle} \usepackage[utf8]{inputenc} \input{preamble.tex} \usepackage{geometry} \geometry{left=25mm,right=25mm,top=25mm,bottom=25mm} %本文 \begin{document} \twocolumn[ \begin{flushright} 右上枠 \end{flushright} \centering{ \LARGE{タイトル} } \section*{ \centering{Abstract} } \raggedright{ Write abstract here. } \vspace{2ex} ] \section{Background} %参考文献 \small \bibliographystyle{IEEEtran} \bibliography{ref} %ref.bibを準備 \normalsize \end{document}
機能活用
キーボードショートカット
コピペなどに関しては基本的なDOS用のコマンドがいくつか使える。
他にはコメントアウトのトグルであるCtrl+/などが有用である。
以下の画像にまとめてある。Macではない機能もあるらしいが使ったことはないしまぁ問題ないかも。

Github等連携
GithubやDropbox等と連携することで管理がしやすくなる。
月額なんと15ドル!ちょっと高いのでやらない()
その他便利環境に関してはこの記事によくまとまっている。
ASUS Zenbook Pro UX550VD の分解清掃を試みた話
結論から申し上げるとネジの箇所を把握しきれず完全分解には至りませんでした。 失敗記事なのですがそもそも本機体の分解に関する記事がネット上にないので情報共有のために残しておくことにします。
何がおきたのか
15ヶ月該当商品を使っていましたが,最近ファンの音が大きく感じるようになりました。
ぼちぼち掃除が必要だなと感じたので分解清掃を試してみます。
該当商品について
2017年に発売開始されたZenbookのフラグシップ機です。
特徴として,大きく重い(15.6インチ 2.4kg)代わりに,Geforce GTX 1050を積んでRAMが16Gがある本格仕様になっております。 一年前に買った時の感想などが載っていますね。
以下はCorei5版ですが今はかなり安く売られているようです。
 ZenBook Pro UX550VD 15.6型液晶")
1年間使ってみて
良かった点として
- 性能で困ることはあまりなかった
- 電池のもちも結構良い
欠点として - とにかく重い - トラックパッドが少し使いにくい(当人の慣れかも)
稀にマウス操作がカクつくなどの現象が置きましたが,ハード由来かソフト由来か不明なので不問とします。
必要なもの
トルクスネジという星型のネジを使っているので普通のドライバーでは開けません。 六角が入らない! 形の違う「トルクス」というねじ | Cyclist
型としては
- T5ドライバー
を探しましょう。
私は以下のものを買いました。

分解工程
裏面のネジを取る
SSD換装動画ですが以下の動画が参考になります。
この際,おすすめなのが両面テープやガムテープを用いてネジの元の位置を保存しておくことです。 本機体は全てのネジが同じ形式っぽかったので問題なかったですが,別のPCだとネジの長さが違ったりするのでとても重要な作業です。
裏蓋の取り外し(追記更新)
機種依存ですが今回チャレンジした感じ的にはゴム足の下にもネジがあるように感じました。がこれは気のせいでした。 www.zoa.co.jp
ここからは裏面を剥がすのですがこれは力押しでやると曲がったりすることがあるので,樹脂製の薄いピックやプラスチックカードなどを隙間に入れて徐々に開けるのが良いです。

うまく開けばこんな感じに中身が見れます。 この中を清掃します。やり方などについてはまた後ほど。
足立先生の「カルマンフィルタの基礎」の誤植について~MATLABを用いた代数リカッチ方程式の求解~
誤植はどの本にもあることです。 なお,手元にあるのは第4版です。

- 作者: 足立修一,丸田一郎
- 出版社/メーカー: 東京電機大学出版局
- 発売日: 2012/10/10
- メディア: 単行本(ソフトカバー)
- 購入: 3人 クリック: 3回
- この商品を含むブログ (5件) を見る
線形カルマンフィルタの終端値とリカッチ方程式
線形カルマンフィルタの事前推定の共分散をPとします。 十分時間が経って定常値となる時のカルマンゲインは
この時,終端値において次の式が成り立ちます。
もっと長く書くとこう。
展開すると
となり,これは代数リッカチ方程式(DARE)となります。
MATLABで解けます。
MATLABでリカッチ方程式を解く解法
Referenceによると,

だそうです。
従って,
[P,L,G]=dare(A',C',Q,R)
と実行することで解を得られます。
誤植箇所
p149 演習6-2の解答
解答ではPの最終値が1+√3としていますが,
[P,L,G]=dare(1',1',4,1)
を計算すると,2(1+√2)=4.8前後が正解の値になるはずです。 なお,スカラなので手計算でリカッチ方程式を解いても同様の値になります。
ドヤ顔で書いてますが間違ってたらすみません。
jupyter notebookのセル出力を横にしたら結構良かった
2019年5月現在,jupyter 4.4.0 にて動作確認。
notebookのセル出力を横にしたい
notebookはhtmlで編集できるらしいので以下のようにセル出力を横にできます。 幅も広くとれて使い勝手良さそう。

設定方法
ここの議論を参考にしました。
以下のコードをセルで実行するだけ。
%%html
<style>
#notebook-container {
width: 90%;
background-color: #EEE
}
.code_cell {
flex-direction: row !important;
}
.code_cell .output_wrapper {
width: 50%;
background-color: #FFF
}
.code_cell .input {
width: 50%;
background-color: #FFF
}
</style>
用途によって左右の比を変えてもいいかと。
なお,Githubのページでは普段どおりに写ります。

カルマンフィルタのゲイン導出メモと共分散行列の遷移
注:これは個人用メモです。
はじめに
もう一度いいますがこれは個人用メモです。
わかりやすい説明などは以下のブログ様などを参考にしたほうが良いです。
差別点は
- 多変量の場合を考慮している点
- 変分ではなく平方完成で導出を行っている点
でしょうか。自分用に覚書がほしかった箇所をメモっています。
本記事の流れ
以下の流れで行きます。
- オブザーバ(濾波型)の推定式からk+1の時の誤差共分散を導出
- 誤差共分散行列を平方完成して最適ゲイン=カルマンゲインを導出
- その時の共分散の更新則を導出
推定に依る誤差共分散の式
- 予測ステップは以下の通りとします。uは入力,vはシステムノイズです。
- 修正ステップは以下の様に書けます。ここでFはフィードバックゲインです。
また,観測方程式からですのでこれを代入して
したがって,誤差共分散は各々の要素が独立だとして以下のように書けます。
そろそろ面倒なのでここからとして書いてしまいます。
の関係を用いて書き下すと,
となります。
誤差共分散を最小化するゲインの導出
後は,変分法でもいいのですが今回は平方完成を用います。
簡単のため,,そして
と置きます。
先ほどの式をFに関する2次系にすると
となります。
したがってこれを最小化するゲインFは自明に
となるわけです。(公式と見比べるためにとしました。)
またこの時,最小値は
となり,公式と同様の値が導出できます。
最適ゲインでないゲインを用いた場合の共分散
最適でないゲインを用いた際の誤差共分散は
という簡単な式ではなく,
をきちんと計算しなくてはいけません。
カルマンフィルタの公式だけを眺めていて一度間違った式を使っていたことがあります。
疑問
ゲインFに何らかの制約があった時に,以下の式
を最小化(ノルムを?)するにはどうすればいいんでしょう?高校数学的な解法は線形代数の場合はどの様に計算するんでしょうね???
追記:LMIの目的関数にしてYalmipで解いてみましたがソルバがないと言われてしまいました。目的関数は非線形になるんですが,凸っぽいような…?
参考文献
今回の導出は足立先生の本にのっています。ベイズ統計などは確率ロボティクスなどを読むとよいです。 ベイズの定理に従うと勝手に最尤値を計算してしまうので今回のような導出にはなりませんが。
- 作者: 足立修一,丸田一郎
- 出版社/メーカー: 東京電機大学出版局
- 発売日: 2012/10/10
- メディア: 単行本(ソフトカバー)
- 購入: 3人 クリック: 3回
- この商品を含むブログ (5件) を見る
")
- 作者: Sebastian Thrun,Wolfram Burgard,Dieter Fox,上田隆一
- 出版社/メーカー: 毎日コミュニケーションズ
- 発売日: 2007/10/25
- メディア: 単行本(ソフトカバー)
- 購入: 1人 クリック: 27回
- この商品を含むブログ (6件) を見る
線形代数は以下の本がいいそうで…

- 作者: D. A.ハーヴィル
- 出版社/メーカー: 丸善出版
- 発売日: 2012/04/05
- メディア: 単行本(ソフトカバー)
- 購入: 3人 クリック: 2回
- この商品を含むブログを見る

- 作者: D. A.ハーヴィル
- 出版社/メーカー: 丸善出版
- 発売日: 2012/04/05
- メディア: 単行本(ソフトカバー)
- 購入: 2人 クリック: 3回
- この商品を含むブログを見る
Raspberry Pi Mouseでサーボモータ(SG90)を動かす
Raspberry Pi Mouse上でのGPIOの配線
SG90はラズパイ上のGPIOポートを用いて制御しますが,ラズパイマウスではそのポートは覆い隠されてしまいます。
しかし,外のデバイスを繋げないかというとそうでもなく,以下の写真の箇所に接続可能なポイントがあります。

ここに書かれている英字は以下のGPIO番号(ピン番号ではない)と対応しています。
- SDA → GPIO2
- SCL → GPIO3
- TXD → GPIO14
- RXD → GPIO15
詳しいピンの位置等は以下の図を参照してください。
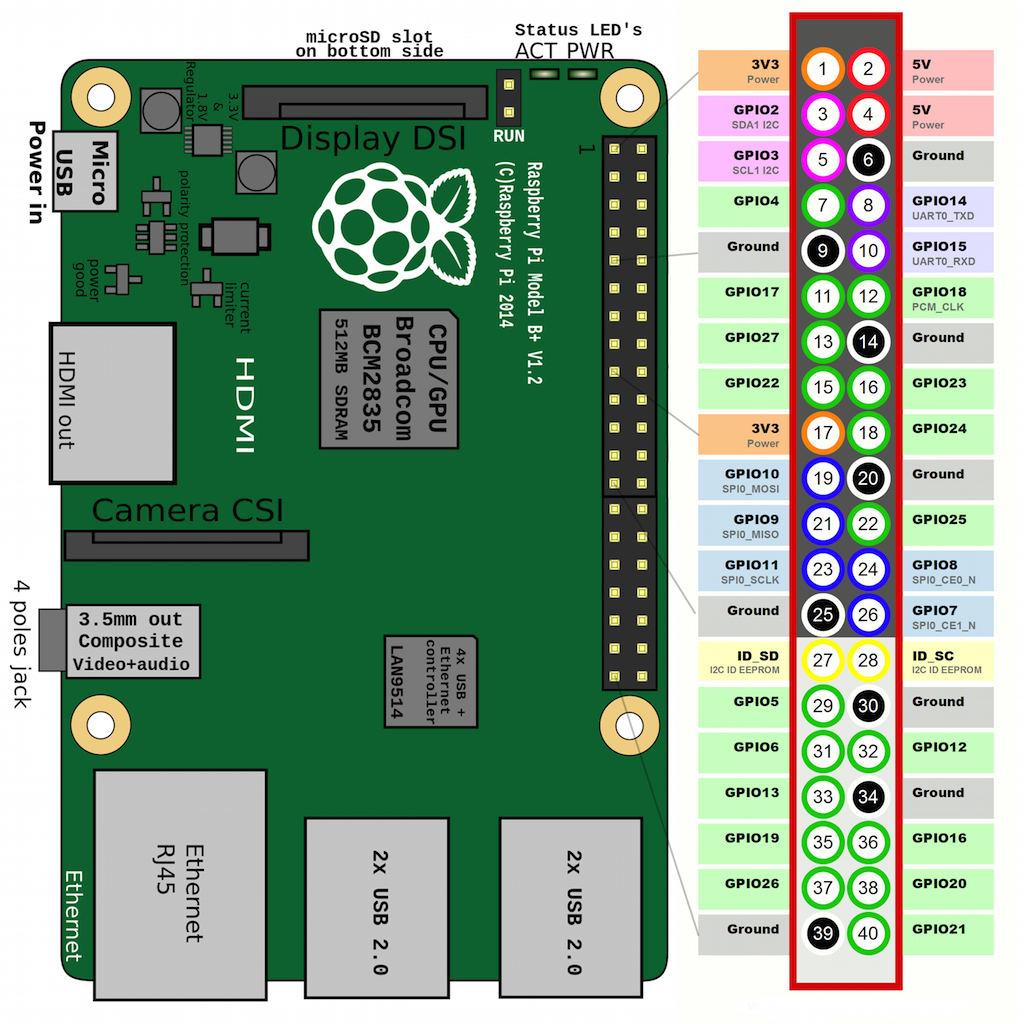
従って,先程の写真のようにオスのピンヘッダをはんだ付けすれば外部出力用として使えます。
ラズベリーパイでSG90を制御する
SG90とは安価に手に入るお手軽なサーボモータです。 可動域は180degでトルクは1.8kgfcm出ます。これは見かけよりはパワーが有ると思って良いです。
")
- 出版社/メーカー: 梅本合同会社
- メディア: おもちゃ&ホビー
- この商品を含むブログを見る
VCCとGNDに加えて制御用の信号が1つの計3つの信号線が必要です。信号はduty比を変えた矩形波を入力しますが詳しい説明に関してはこちらのサイトがわかりやすいと思います。
私はSDA,すなわちGPIO ポート2を信号線用に使うことにしました。
- 以下補足情報
本来求められるPWM信号は4.8VくらいでGPIOは3.3Vしか出ないのですが,一応直挿しでも動きはします。ただ,時々ちょっと振動的な挙動を示すので精度が必要ならちゃんとやるべきかも(サンプル数1)
SG90用コントローラ クラス
初期化などの処理をまとめたかったのでクラスで実装しました。 最新版はここで管理しますが,現在は以下のような感じに書いています。
大まかな挙動は
- ポート番号を渡して初期化
- 角度をdegreeで渡して制御
- stop()関数でサーボ状態から抜ける
となっています。
import RPi.GPIO as GPIO class SG90servo(): def __init__(self,motorport=2): self.port = motorport GPIO.setmode(GPIO.BCM) GPIO.setup(self.port, GPIO.OUT) self.servo = GPIO.PWM(self.port, 50) self.servo.start(0.0) # set duty cicle to 0-100 self.minlim = -90 self.maxlim = 90 def servo_deg(self,deg): if deg > self.maxlim: print("Exceed max degree!") return elif deg < self.minlim: print("Exceed min degree!") return cycle = 7.25+4.75*deg/90.0 self.servo.ChangeDutyCycle(cycle) def stop(self): self.servo.start(0.0)
宣伝枠
ラズパイマウス,ちょっと高いですが手軽に勉強できるので教育的にはいいのかなと思います。

- 出版社/メーカー: 株式会社アールティ
- メディア:
- この商品を含むブログを見る

- 作者: 上田隆一
- 出版社/メーカー: 日経BP社
- 発売日: 2017/03/30
- メディア: 単行本
- この商品を含むブログ (1件) を見る
MarkdownとVScodeで爆速PDFレポート作成(Pandoc,Latex経由なし)
目的
以下の縛りのあるレポートをMarkdownを使って書きます。
- 体裁指定のない小レポート
- タイトル・所属を書けばあとは自由
PandocやLatexを経由しないため手間を最小化できます。
必要なもの
VScode周りは以下の記事などを参照に ossyaritoori.hatenablog.com
設定
余分なヘッダーの削除
デフォルトでは謎のHeaderがついています。邪魔です。
上の記事に倣って,
- 「ファイル」→「基本設定」→「設定」を開く
markdown-pdf.headerTemplateで検索- setting.jsonに
"markdown-pdf.headerTemplate": "<span class='title' style='display: none;'></span>"を追記
を行います。
テンプレート
タイトルは#で,以下セクションは##で書きます。
所属のところだけhtmlで右揃えにすればそれっぽいですね。
# タイトル <div style="text-align: right;"> 所属とか日付とか </div> ## 1. Sectionは##で ほげほげ ## 2. Sectio番号は手打ち ほむほむ ### 2-1. Subsectionは`###`で ふがふが ### 2-2. 余談だが - Ctrl+Alt+P をPDF変換のショートカットに登録したがいい感じ
- 出力はこんなの

Section Numberingの自動化
章の番号を自動で割り振る機能がある。 右クリックから呼び出すメニューでToggle可能。
もっと頑張りたい人に
Pandocを使いましょう。というか直接Latex書いてもいいかと。